Select product








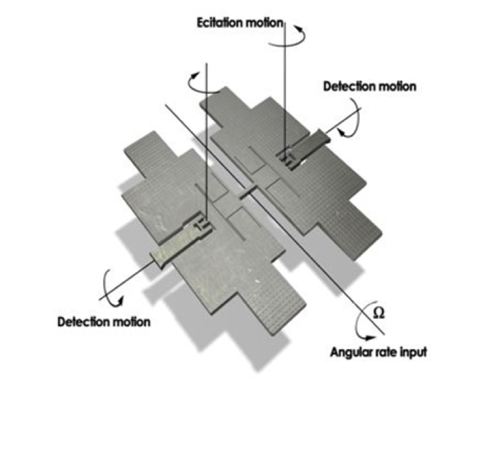
Sensonor manufacture MEMS vibratory gyros based on the Coriolis effect. Below is a model of the Butterfly Gyro with two masses which are driven (excited) to oscillate at a resonance frequency close to 10 kHz. When a rotation of the gyro around the sensitive axis is applied, the two masses will deflect in a direction different to the oscillation. This is called the detection motion, which ultimately gives the angular rate sensed by the gyro.
No, the STIM gyros are mounted to the housings before calibration which is necessary for achieving the high performance they have. Housings cannot be modified.
Sensonor can in some cases perform FW updates. The STIM products are not designed for mechanical repair.
Sensor’s standard CoC is available with each shipment for customers that require this.
The STIM firmware can only be updated by Sensonor at our facilities.
Yes, the gyros (as well as accelerometers and inclinometers where available) use internal temperature measurements to continuously compensate the output signal.
This is the time needed from power-on or reset to clearing of the start-up bit (bit 6 in the status byte). During this period the output data should be regarded as non-valid. Details for each product is given by the product specifications.
STIM202 is designed with internal mechanical dampers for operation in environments with shocks, e.g. direct mounting on remote weapon stations. STIM210 does not have mechanical dampers and also has twice as high data output rate compared to STIM202.
Bias instability is measured by Allan Variance method, according to IEEE std. 952.
- Test is performed at room temperature (~25°C)
- Power is applied 2 hours prior to data collection
- Data are collected for 18 hours
- The root Allan variance is plotted and the bias instability is defined as the lowest point of the curve.
ARW is the white (random) noise of the sensor and is read from the root Allan variance curve at 1 second averaging time.
STIM uses cascaded integrator-comb (CIC) low pass filters with linear phase response. Filter bandwidth (-3dB) is user configurable and can be set to 16Hz, 33Hz, 66Hz, 131Hz or 262Hz.
Group delay is the processing time of the signal through the low pass filter. The delay depends on filter bandwidth.
Time Of Validity (TOV) is for synchronization of datagram transmission with external events. TOV falling edge occurs synchronous to the sample rate. Raising edge occurs after last bit of datagram.
No, STIM does not operate as a standalone AHRS.
The gyros can output angular rate, or integrated and incremental angle.
The accelerometers can output acceleration, or integrated and incremental velocity.
The integrated angle output is the angle since start-up or reset. The integrated angle is limited to ±4°, at which points a wrap-around occur.
Incremental angle is the change in angle since the previous sample.
E.g.: (100 °/s) / (125 sample/s) = 0.8°.
STIM IMUs does not output position, but is used in several positioning systems.
One of the leading GNSS/INS system builders obtain about 6 m horizontal position error after 60 seconds during a GNSS outage.
- 2g: 0.5μg
- 5g: 1.0μg
- 10g: 1.9μg
- 30g: 3.8μg
- 80g: 15.3μg
Verify that the bit rate settings of the computer serial port are in accordance with the STIM communication settings.
This error message occur when the EVK software don’t detect the startup datagrams. This happens when the STIM device is powered before the “Apply voltage” switch is flipped when connecting the STIM to the EVK SW.
Disconnect the STIM and make sure the correct procedure is followed when connecting as described by the EVK user manual.
Sensonor can help with examples e.g. for converting data bytes to angular rate measurements or how to calculate the cyclic redundancy check (CRC).
The cyclic redundancy check (CRC) is a common way of making sure the data has been correctly transmitted – i.e. that the received data is identical to what was transmitted. The STIM calculates and output a check-number based on the contents of the transmitted data itself. The receiver will perform the same CRC calculation and compare to the received CRC to verify that the transmission was successful.
Accelerometer measures the acceleration it experiences
See also
Attitude Heading Reference System. 3-axis sensors that provide heading, attitude and yaw information for aircraft. Replaces traditional mechanical gyroscopic flight instruments
See also
Silicon and glass substrates are bonded at elevated temperature and with a high DC potential creating an electrical field. Sodium ions between the substrate surfaces are forming a solid chemical bond.
Bipolar junction transistors and Metal-Oxide-Semiconductor technology into a single device
See also
Method of depositing a monocrystalline film on a monocrystalline substrate
See also
The frequency with which a component fails
See also
Failure occurred during normal operation by end user
Device for measuring or maintaining orientation, based on the principles of angular momentum
See also
The resistance of mass, i.e. any physical object, to a change in its state of motion
See also
Inertial Navigation System. Navigation aid that uses a computer and motion sensors to continuously calculate the position, orientation, and velocity of vehicles
See also
Wireless transmission at Low Frequency in the range of 30kHz-300kHz
See also
Small computer on a single integrated circuit designed for small applications
See also
Describes how under-damped an oscillator is. In electronic engineering, as a measure of the 'quality' in a well tuned circuit or resonator
See also
Remotely Operated Vehicle. Underwater robot common in deepwater industries such as offshore hydrocarbon extraction.
See also
Ring Laser Gyroscope. Uses interference of laser light within an optical ring to detect changes in orientation and spin
See also
Technical standard defining Electrical Characteristics of Balanced Voltage Differential Interface Circuits
See also
Small-Outline Integrated Circuit. Surface-mounted integrated circuit (IC) package
See also
Serial Peripheral Interface bus. Synchronous serial data link standard that operates in full duplex mode
See also
Silicon and glass substrates are bonded at elevated temperature and with a high DC potential creating an electrical field. Sodium ions between the substrate surfaces are forming a solid chemical bond.
A tactical grade IMU can be used to provide stand-alone navigation for a few minutes. Tactical grade IMU's are used extensively in the industry and defense sector due to their cost effective performance. Most often, tactical grade is used to describe gyro performance with in run bias stability in the 1°/h range and angular random walk (ARW) of 0.15 °/√h or better. Sometimes it can also be used to describe parts with in run bias stability in the range of 0. 5°/h to 5 °/h and in rare cases to include in run bias stability up to 10 °/h.
A tactical grade IMU can be used to provide stand-alone navigation for a few minutes. Tactical grade IMU's are used extensively in the industry and defense sector due to their cost effective performance. Most often, tactical grade is used to describe gyro performance with in run bias stability in the 1°/h range and angular random walk (ARW) of 0.15 °/√h or better. Sometimes it can also be used to describe parts with in run bias stability in the range of 0. 5°/h to 5 °/h and in rare cases to include in run bias stability up to 10 °/h.
Produce images of radiation in the infrared range of the electromagnetic spectrum.
See also
The document can be found here
This example only decodes STIM300 datagrams which fulfills the following requirements:
Datagram contents: gyro output, accelerometer output and inclinometer output (Datagram identifier 0x93)
Output unit, gyros: angular rate (output scaled for 400°/s gyros)
Output unit, accelerometers: acceleration (output scaled for 10g accelerometers)
Output unit, inclinometers: acceleration
Data starts at first byte of a datagram (i.e., datagram identifier) and contains only datagrams of the specified type
This is a Matlab programming example.
The source code can be found here
The radiation report can be found here
The paper can be found here
The report can be found here
The paper can be found here
The document can be found here
The document can be found here
The technical note can be found here
The paper can be found here
The paper can be found here
The application note can be found here
The application note can be found here
The document can be found here
The document can be found here
The document can be found here
